
Açılı motor kontrolü
İyi çalışmalar,
Arkadaşlar otonom araba geliştiriyoruz ve yazılım kısmında bir bazı sorunlarımız var ;
Arduino ile toplam 3 adet dc motor kontrol ediyoruz bunların 2 tanesi arka motorlar 1 tanesi ise tekerlerkleri sağa veya sola döndürecek olan motor.
Ben kısaca şu ana kadar yazdığım kodu anlatayım;
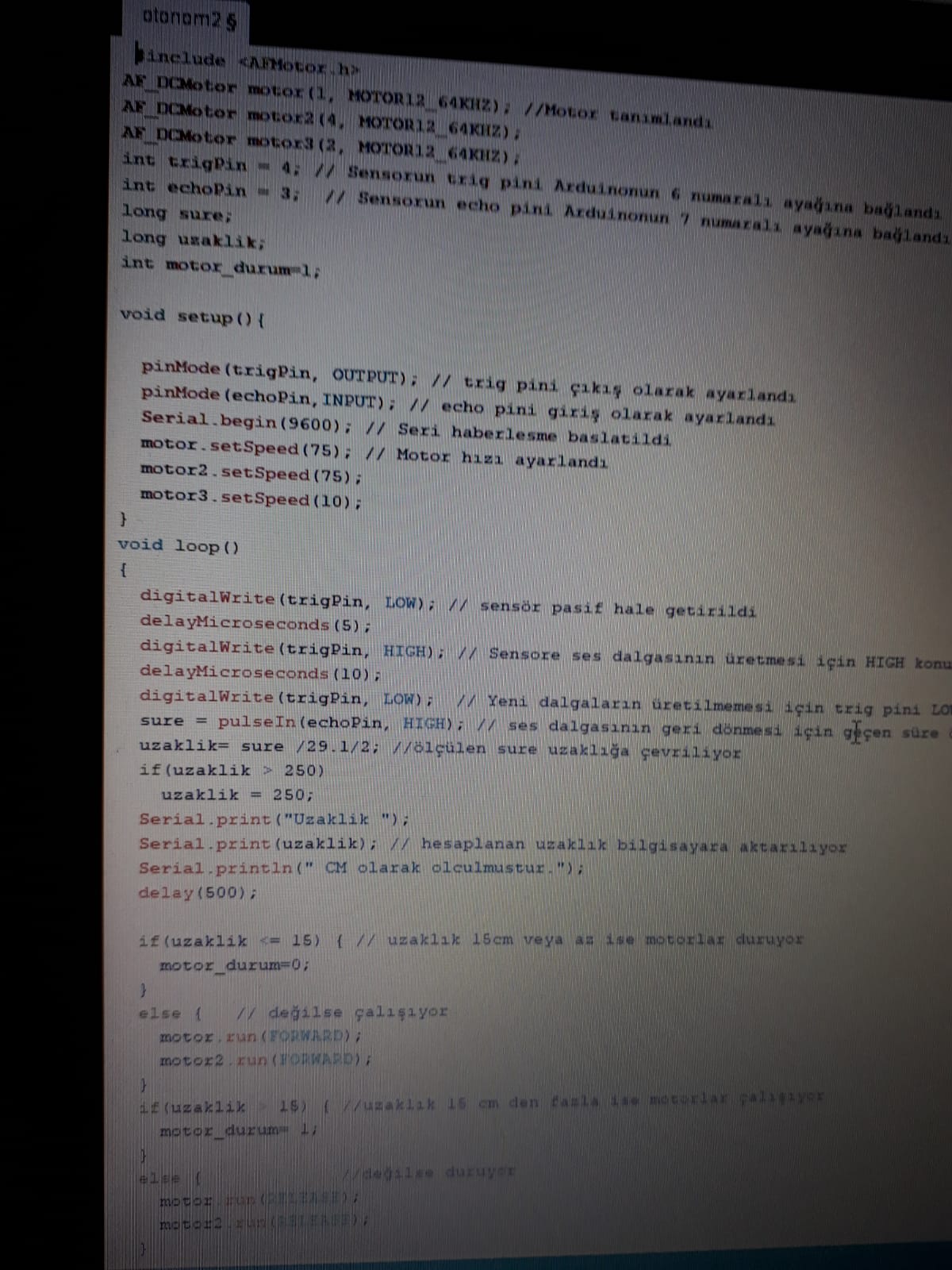
HC-SR04 Ultrasonik mesafe sensörüm cm cinsinden ölçme yapıyor ve ölçtüğüm değer 15cm den küçük ise motorlar duruyor, 15cm den büyük ise motorlar çalışıyor.
Ben ön tekerlerimi kontrol edecek motora önüne engel geldiğinde 2 sn beklemesini ve ardından sağ veya sola dönmesini ardından arka motorlarımın çalışıp ilerlemesini ve ardından engeli atlattıktan sonra ön motorumun eski haline gelmesini istiyorum. Yardımcı olursanız çok sevinirim.
Yazdığım kodları paylaşıyorum.


{kind=link}