Arduino ile DC Motor Sürme
Lisans:
Creative Commons
26.11.2020
tarihinde güncellendi
Bakabileceğiniz Etiketler:
Eğitmen:
Geleceği Yazanlar Ekibi
Arduino projeleri denildiğinde akla ilk gelen DC motorla kontrol edilen otonom araçlardır. Bu bölümde DC motorun Arduino ile nasıl kontrol edileceğini öğreneceğiz. DC motorun ileri veya geri dönmesinin yanında, dönme hızını da Arduino üzerinden kontrol edeceğiz. Arduino pinlerinden verilebilen akım motorları çalıştırmak için yeterli olmamaktadır. Bu yüzden DC motorlar, motor sürücülerle kullanılmalıdır. Motor sürücüsü kullanmadan doğrudan motoru Arduino'ya bağlamak, Arduino'nun pinlerine zarar verebilir.
DC motorları kullanmak için motor sürücüsünü hazır devre kartı olarak alabileceğiniz gibi kendiniz de devreyi kurabilirsiniz. Fakat devre üzerinde çok fazla bağlantı olduğu için, devreye yeni fonksiyonlar da eklendiğinde devre karışıklığı artmaktadır.
Sistemin nasıl çalıştığını kavrayabilmek için bir kereye mahsus olsa da devrenin hazır kart kullanılmadan kurulması yararlı olabilir. DC motorlar için Arduino pinlerinden çıkan akımı kuvvetlendirmek ve motorların hızını kontrol etmek için L298 entegresini kullanacağız. Benzer entegreler de aynı görevi yapmaktadır. L298 entegresinin en önemli özellikleri, 2 ampere kadar dayanabilmesi ve iki adet H köprüsünün bulunmasıdır.
Not: H Köprüsü DC motorların ileri ve geri yönde hareket etmesini sağlayan devredir. Devrede 2 adet NPN ve 2 adet PNP transistör bulunur.
L298 entegresinde 15 adet pin bulunmaktadır. Bu pinlerden bazıları motorlara, bazıları Arduino'ya bazıları ise besleme kaynağına bağlanacaktır. L298 entegresinin pinleri aşağıdaki resimde gösterilmiştir.
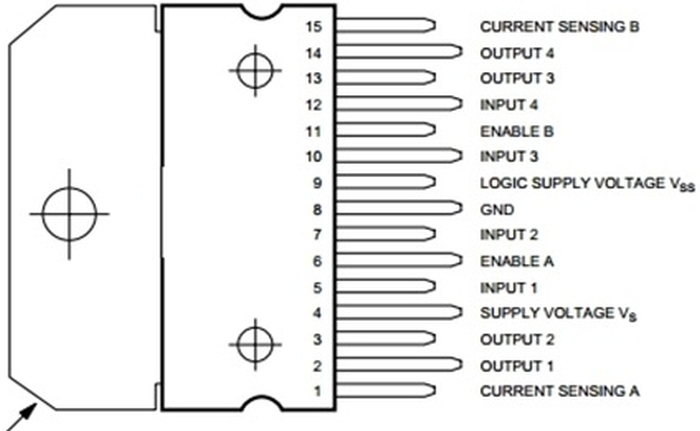
Entegre üzerinde bulunan pinlere ve bu pinlerin görevlerine kısaca göz atalım:
Hatırlatma: PWM sinyali daha önce öğrendiğimiz gibi bir kare sinyaldir. Bu sinyalin 5 volt ve 0 volt düzeylerinin oranına görev zamanı denir. Görev zamanı çıkış sinyalinin genliğini belirlediği için motorların dönme hızını ayarlamada kullanılır. Motorlar için PWM sinyalini üretmek için Arduino'nun analogWrite fonksiyonunu kullanacağız.
Entegre üzerinde bulunan pinlerin görevlerini öğrendiğimize göre motor sürücü devresini kurabiliriz. Devreyi test etmek için öncelikle breadboard üzerinde devre elemanını yerleştirip kablo bağlantılarını yapalım. Devre için kullanılacak Arduino kodu, konunun ilerleyen kısmında paylaşılacaktır. Devrenizin hatasız olarak çalıştığından emin olduktan sonra devrenizi delikli pertinaks üzerine kurabilirsiniz.
Yukarıda anlatılan tüm işlemler ilk defa motor sürücüsüyle tanışanlar için anlatılmıştır. Her projede tekrardan motor sürücüsünü kurmak hem zahmetli olmakta, hem de devrenin fonksiyonları arttığında karmaşıklığı arttırmaktadır. Bu yüzden piyasada bulunan hazır motor sürücüleri kullanmak daha mantıklıdır. Fakat hazır motor sürücüler kullanılsa bile sistemin nasıl çalıştığının bilinmesinde fayda vardır.
Piyasada Arduino üzerine direkt olarak takılabilen shield sürücüler bulunduğu gibi, harici olarak pinle Arduino'ya bağlanabilen motor sürücüler de bulunur. İki motor sürücü türü de aynı işlemi yapmaktadır. Shield tarzı motor sürücülerin kullanımı daha kolaydır, fakat fiyatları diğer motor sürücülere göre daha fazladır.